Only for you 68569 views. If the resistance of the motor is increased then the pull out speed of the motor decreases.
Industrial Motor Control Starters Magnetic Motor Starter
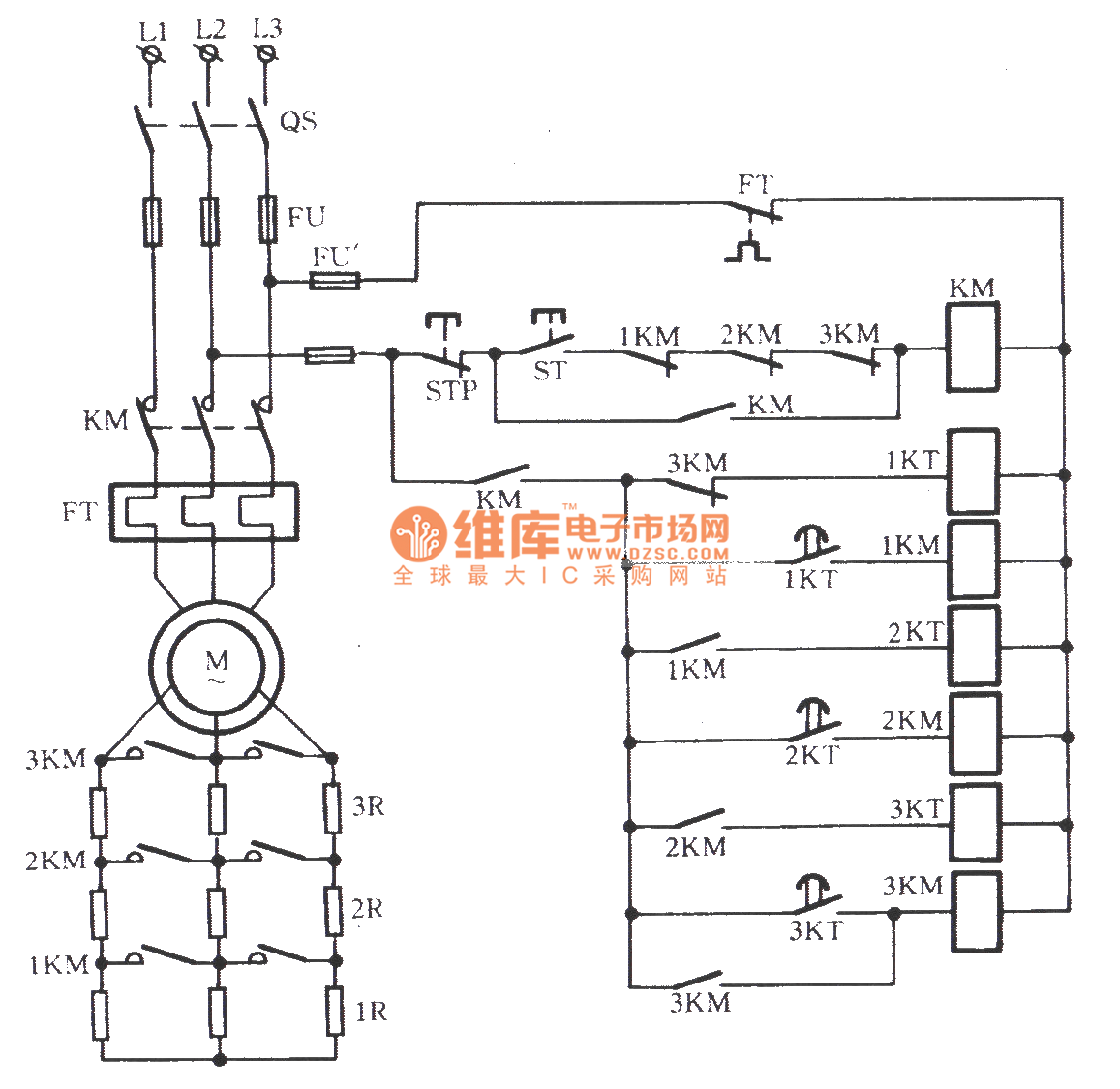
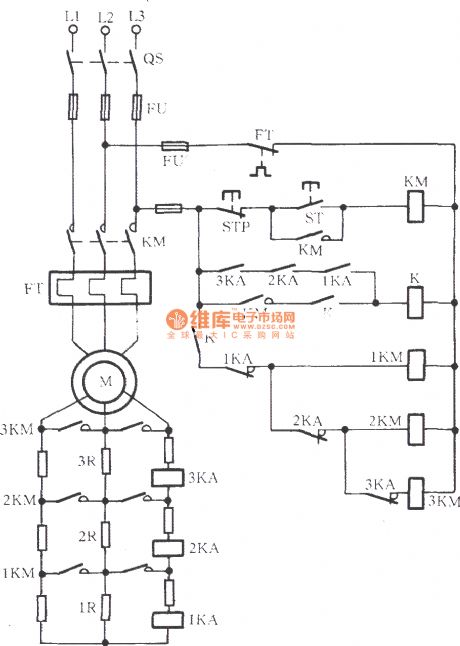
Rotor resistance starter control circuit diagram. Resistance is varied by changing the distance between electrodes and earth electrode. Increase in slip in turn means reduction in induction motor speed. In the above figure the maximum torque is same for rotor resistance r 1 r 2 and r 3 but the slip increase from point a to b c. Rotor resistance can also be varied steplessly using the circuit shown in figure a. 714 shows how the motor torque speed curve would change if rotor resistance is increased and all other parameters in the motor equivalent circuit stay the same. Advantage of this method is that resistance can be changed steplessly.
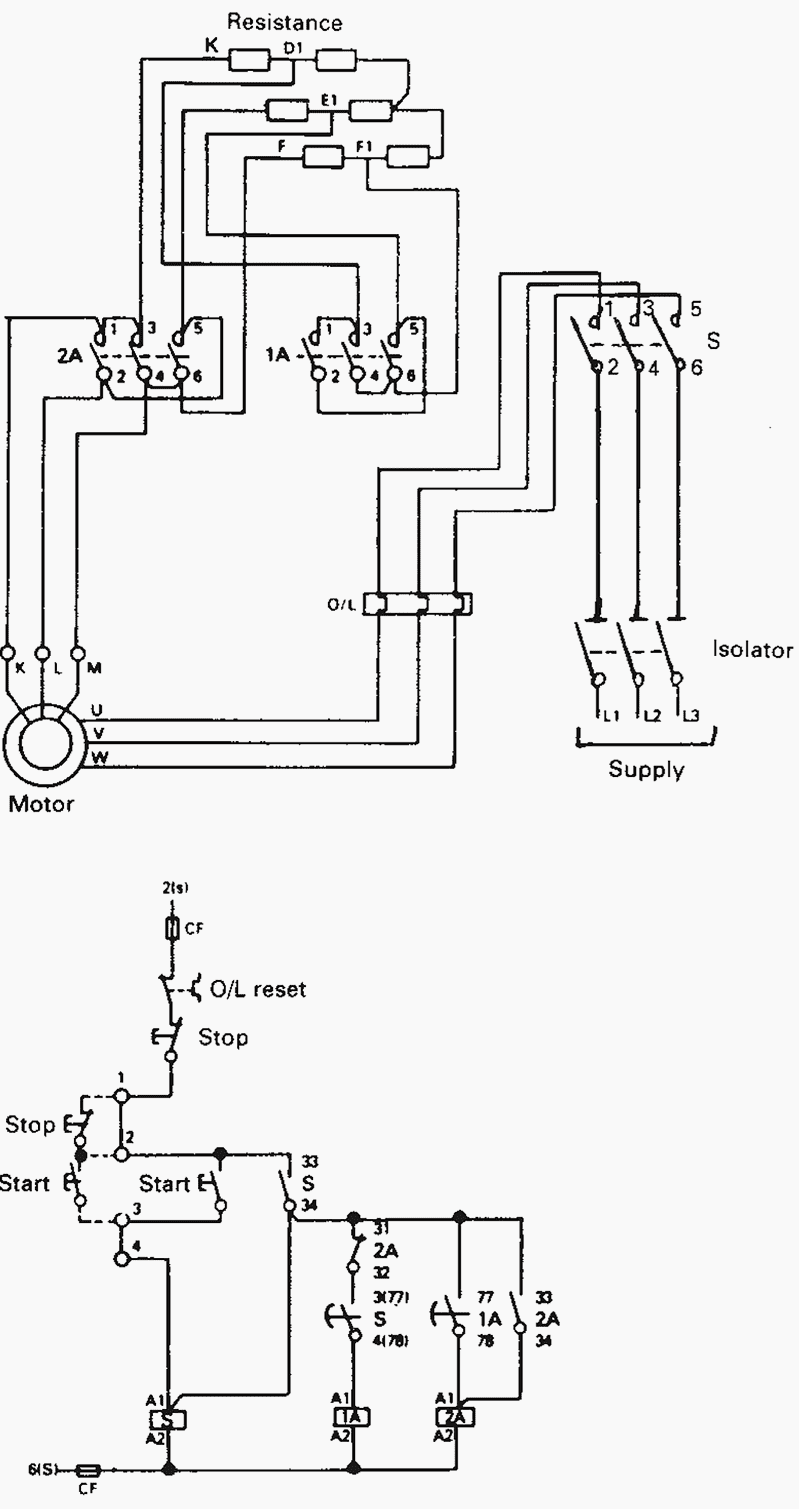
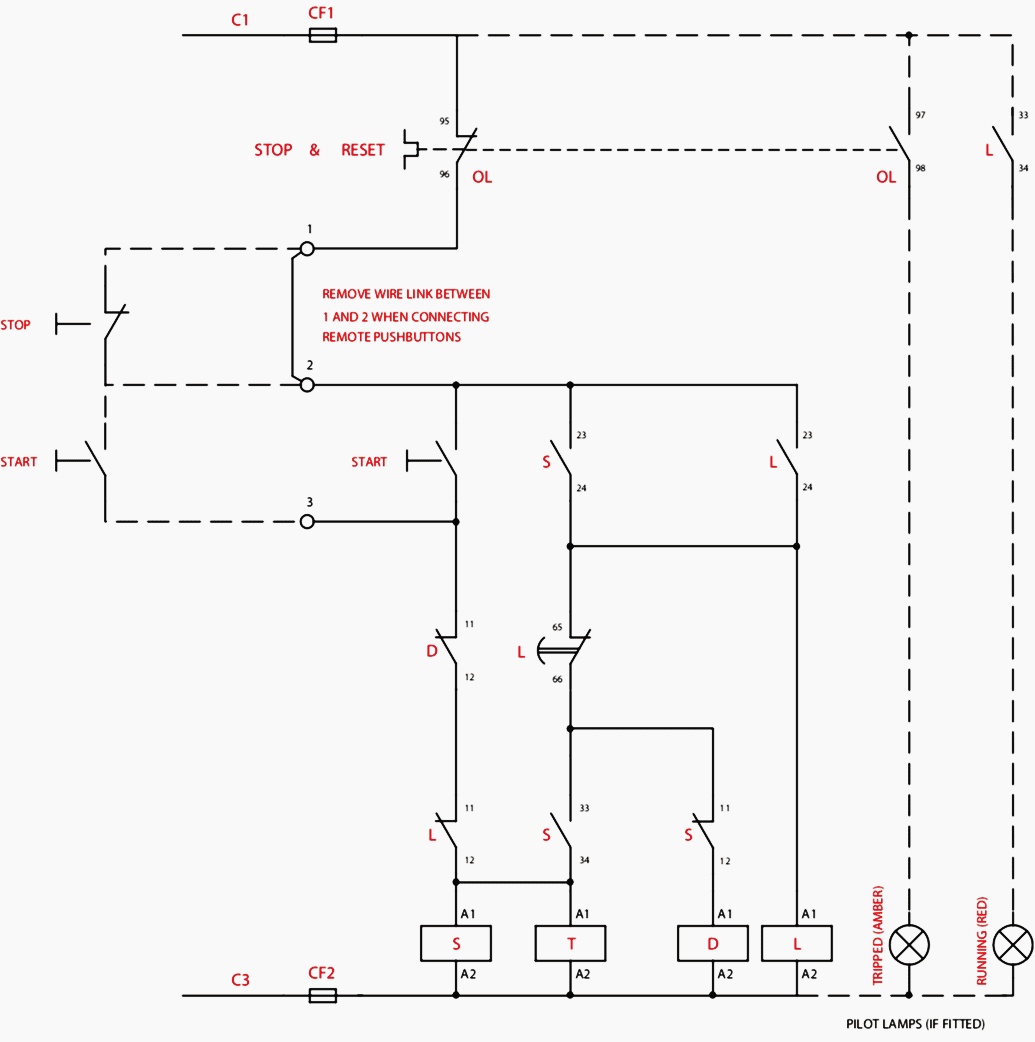
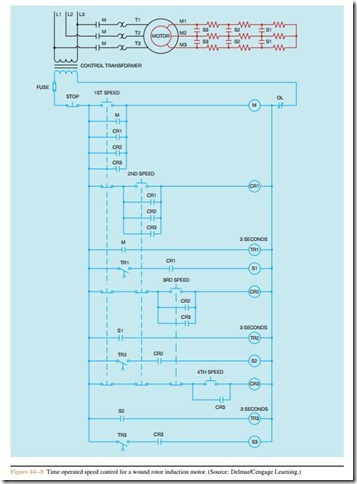
Lecture 36rotor resistance speed controlrotor side speed control3 phase induction motor duration. Speed control of induction motor part 1. Three phase slip ring rotor starter control power diagrams 3 phase slip ring rotor starter control power diagrams slip ring rotor power and control breaking news up tp 93 off launching official electrical technology store shop now. When the power is high electrodes are driven by a small motor. Rotor resistance can also be varied steplessly using circuit of fig. Rotor resistance starter in three phase induction motor.
The rotor circuit resistance has significant impact on starting torque the speed at which the breakdown torque occurs and the slip during the normal running operation. Static rotor resistance control. But the maximum torque remains constant. This means increasing rotor resistance results in increase in slip. Introducing resistance in rotor current will decrease the starting current in the rotorand hence in. Overhead crane or eot crane power diagram duration.
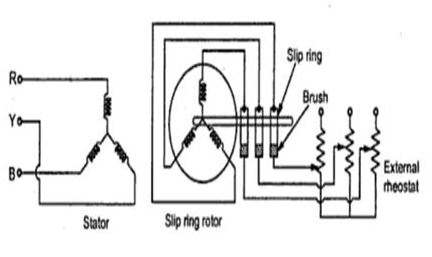
Thus by rotor resistance control method the speed control is provided by the rated speed to the lower speedsthis method of speed control is very simple. Electrical yatra 6591 views. The ac output voltage of the rotor is rectified by diode bridge rectifier and fed to parallel combination of fixed resistor r and a semiconductor switching transistor t reffective value of resistance across terminal a and b ie r ab is varied by varying duty cycle of the transistor t r which in turn. Thus we can say that by rotor resistance control we can achieve variable speed at a constant torque. These motors are started with full line voltage as external resistance can be easily added to the rotor circuit with help of slip ringsa star connected rheostat is connected in series with the rotor via slip rings. It is possible to have a large starting torque low.
Gallery of Rotor Resistance Starter Control Circuit Diagram